04
FLIGHT CONSOLE
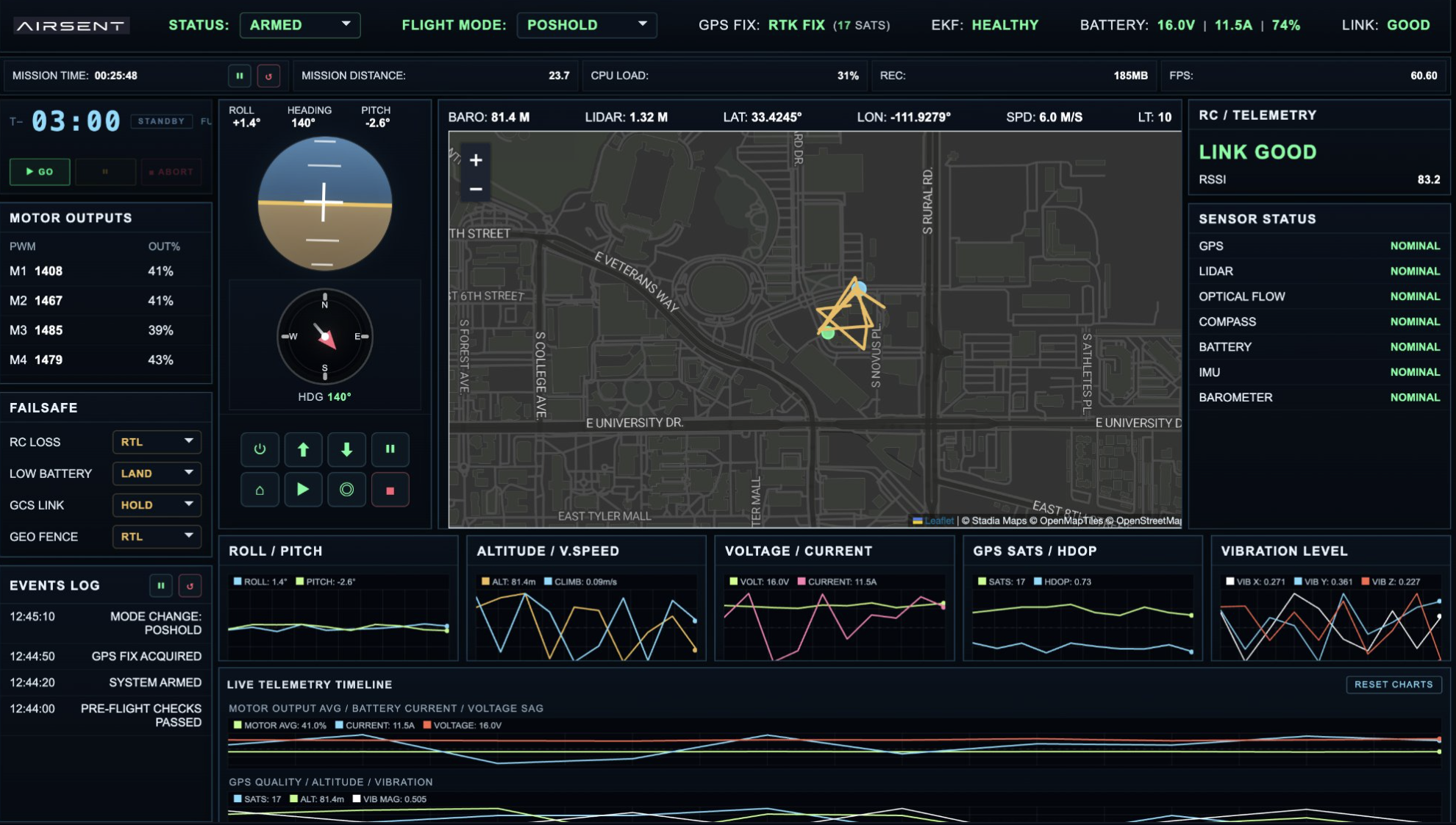
Airsent Flight Console
Airsent's custom Flight Console gives operators complete visibility from pre-flight through touchdown. Every screen is designed around safe, autonomous drone delivery and precision landing operations.
FLIGHT CONSOLE
Dashboard
Live telemetry, mission tracking, map view, battery status, motor outputs and real-time flight monitoring.